يُطلق البعض اسم تقمص الآلة على عملية التشغيل عن بُعد للروبوتات عبر الواقع الافتراضي، وهي واحدة من أكثر التقنيات إثارةً وتقدماً في عالم الروبوتات الحديثة.
يقوم فيها مشغل بشري بالتحكم في الروبوت (وهو غالباً روبوت بشري الشكل) عن بُعد وبشكل آني، حيث يرتدي نظارة للواقع الافتراضي ومتحكمات في اليدين والخصر والأرجل، لتسجيل حركته بدقة في الفضاء ثلاثي الأبعاد، ومن ثم نقلها مباشرة إلى الروبوت. يقوم الأخير بمحاكاة حركات المشغل بدقة متناهية، مما يخلق حالة هندسية أشبه بتقمص الإنسان لجسد الآلة.
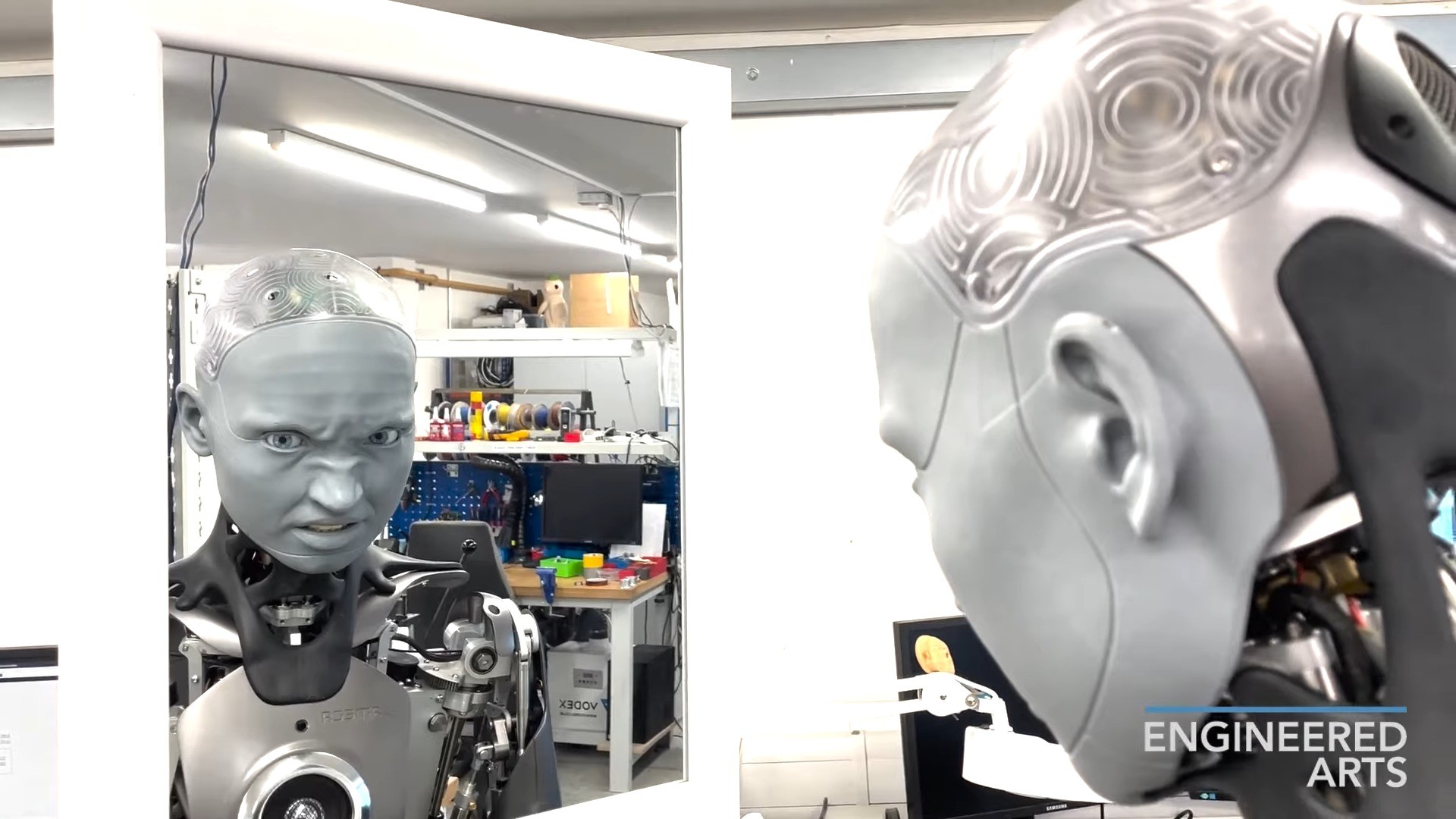
تبث الكاميرات المثبتة في رأس الروبوت مشهداً حياً ومجسماً مباشرة إلى شاشة النظارة، مما يضع المشغل بصرياً في بيئة الروبوت الفعلية، ويمنحه شعوراً وكأنه يقف مكان الروبوت. في هذه الأثناء، يتدخل الذكاء الاصطناعي كوسيط لمعالجة الفروق البدنية بين الإنسان والروبوت عبر عملية ترجمة ذكية للحركة؛ حيث تُكيّف الخوارزميات حركات الإنسان اللحظية لتناسب أبعاد وفيزياء الروبوت، مع ضمان استقراره وتوازنه بحسب قدراته الفيزيائية، ثم ترسل الأوامر إلى المحركات الدقيقة في مفاصل الروبوت لتنفيذ الحركة في أجزاء من الثانية.
من التحكم البشري إلى التدريب
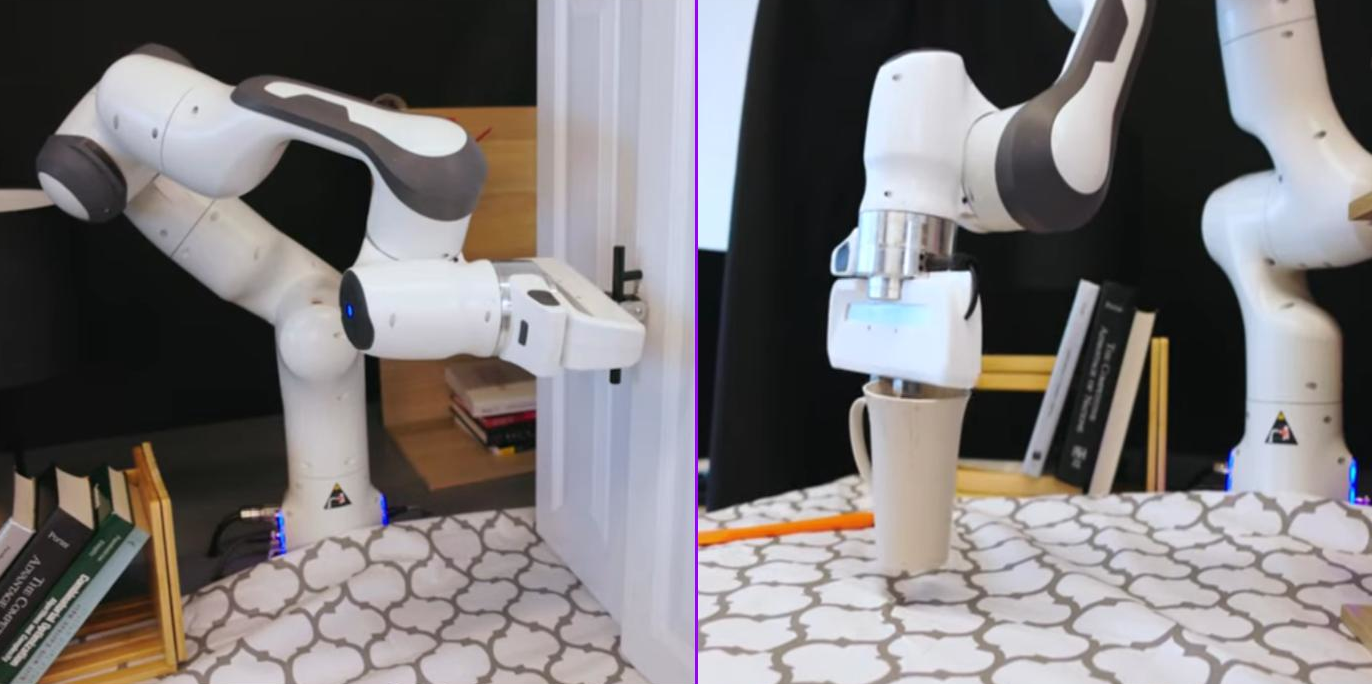
تتجاوز أهمية هذه التقنية مجرد التحكم عن بُعد لإنجاز مهام في بيئات خطرة كالمفاعلات النووية، لتصبح حجر الأساس في تدريب الجيل القادم من الذكاء الاصطناعي للروبوتات. فبدلاً من قضاء آلاف الساعات في كتابة أكواد برمجية معقدة لتعليم الروبوت كيفية طي الملابس أو ترتيب الأطباق، يرتدي المشغل البشري معدات الواقع الافتراضي ويقوم بأداء المهمة بنفسه من خلال جسد الروبوت.
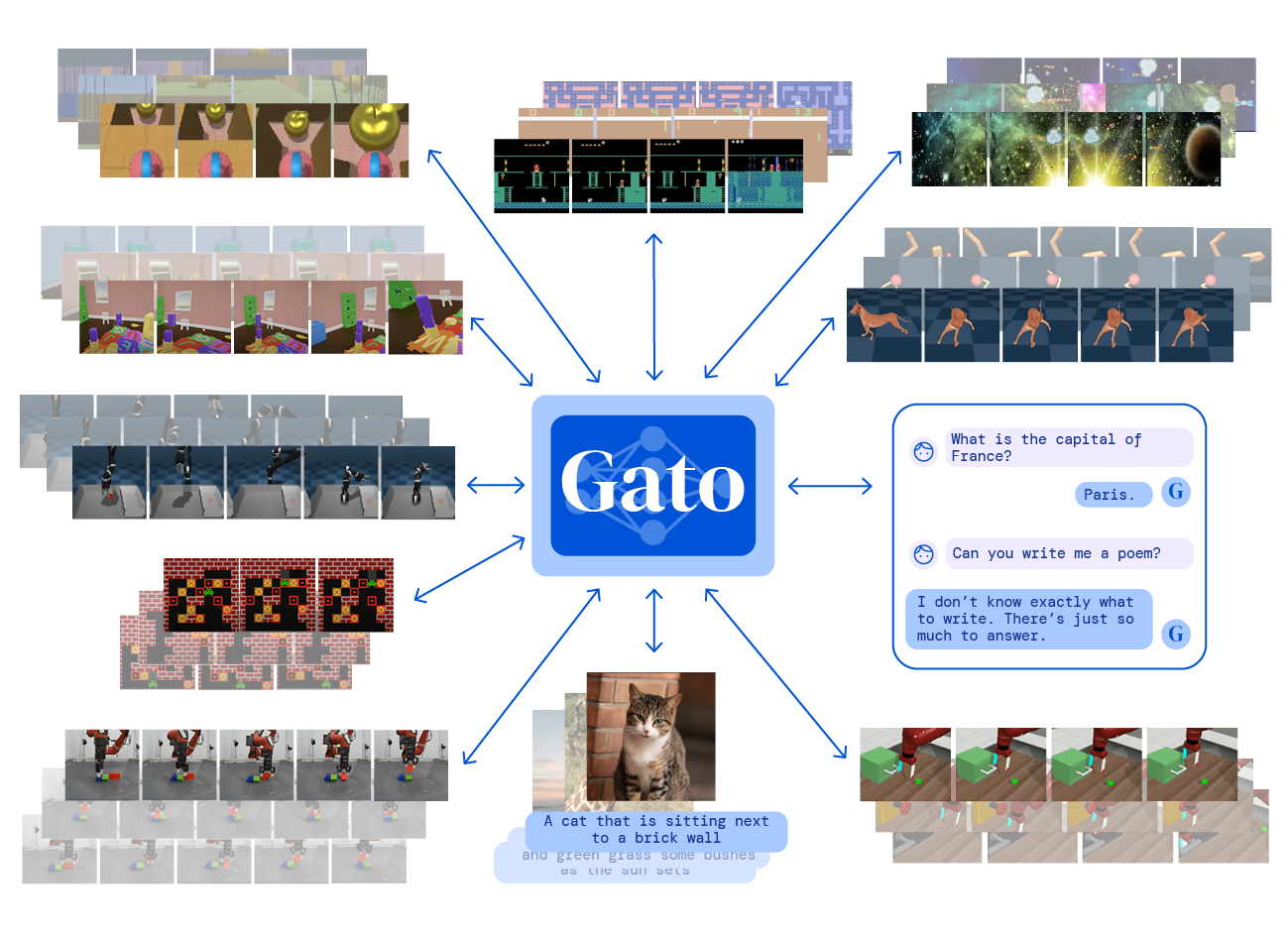
خلال هذه الممارسة العملية، تسجل مستشعرات الروبوت كميات هائلة من البيانات الدقيقة حول زوايا الحركة، ومقدار القوة المبذولة، وطبيعة التفاعل مع الأشياء المحيطة. تُستخدم هذه البيانات الغنية كأمثلة تدريبية لنماذج الذكاء الاصطناعي الحركية لتتعلم الأنماط وتفهم السياق. ومع تكرار هذه العملية، يكتسب الروبوت الخبرة اللازمة للانتقال من مرحلة التشغيل البشري المُوجَّه إلى مرحلة التشغيل الذاتي المستقل، حيث يصبح قادراً في المستقبل على التعرف على بيئته وتنفيذ تلك المهام المعقدة ذاتياً وبدون أي تدخل بشري.
وما نراه اليوم من تطور مذهل في عالم الروبوتات هو نتيجة مباشرة لهذه التقنيات. فالروبوتات المتقدمة التي تتصدر المشهد حالياً، مثل روبوتات جي 1 (G1) وغيرها من النماذج الرائدة، والتي تبهرنا بحركاتها الانسيابية المعقدة كالرقص المتناغم، والقفز السريع، وحتى أداء الشقلبات الخلفية أو المهام الحركية الدقيقة، تدين بالفضل الكبير لتقنيات التقاط الحركة والتشغيل عن بُعد. فبدلاً من البرمجة اليدوية التي كانت تجعل حركة الآلات بطيئة ومتصلبة، سمح هذا النهج بنقل "الذكاء الحركي البشري" التلقائي إلى الشبكات العصبية. وعند دمج هذه البيانات البشرية الضخمة مع بيئات المحاكاة الذكية التي تدرّب الروبوت ملايين المرات بسرعات مضاعفة، يُولد لدينا هذا الجيل الجديد من الروبوتات القادرة على التكيف والتحرك برشاقة غير مسبوقة.