تُستخدم الروبوتات رباعية الأرجل في المصانع والمراكز التجارية للتفتيش والبحث عن مخاطر محتملة كالتسربات الحرارية والغازية وارتفاع الحرارة، لكنها تعاني من صعوبة في التنقل في الكثير من الأماكن التي تحتوي سلالم، مما يحتم على البشر التسلق وفحص الأماكن الأكثر صعوبة وخطورة بشكل دوري.
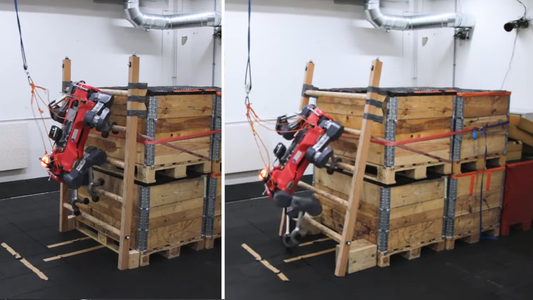
لذلك قام فريق من باحثي ومهندسي الروبوتات في معهد ETH في زوريخ في سويسرا بتدريب روبوت ANYbotics ANYMal رباعي الأرجل لجعله يتسلق السلالم العادية بسرعة ورشاقة.
وجد الفريق أنه يتم تزويد أرجل الروبوتات بأقدام كروية أو مسطحة التي لا تساعد في التثبيت عند الحركة الصعودية، لذلك قاموا بتصميم محرك طرفي معقوف يتمتع بقدرة إمساك تشبه الخطاف يولد القوة اللازمة للتسلق، ثم استخدموا التعلم المعزز لتدريب الروبوت كيفية استخدام خطافاته لتسلق سلالم مختلفة الارتفاع والطول والميلان.
وقد قاموا بعملية التدريب باستخدام المحاكاة، حيث تم تدريب الروبوت على تسلق عدد كبير من السلالم المختلفة والمتنوعة في بيئات متعددة، ليتمكن من تسلق أي نوع من السلالم قد يصادفه في البيئات الواقعية.
وبعد انتهاء التدريب ونقل سياسة التحكم التي تعلمها الروبوت في المحاكاة إلى روبوت حقيقي، جرب الباحثون الروبوت في بيئات واقعية تحتوي أنواع متعددة من السلالم، وقد نجح الروبوت في التسلق بنسبة 90% متفوقاً على الروبوتات الأخرى وعلى نفس الروبوت الذي لا يستخدم محرك خطاف في أقدامه.
يسعى الباحثون في أعمالهم المستقبلية على جعل الروبوتات رباعيات الأرجل قادرة على نزول السلالم أيضاً وتطوير الخطاف في الأقدام لجعلها أسرع وأكثر كفاءة.