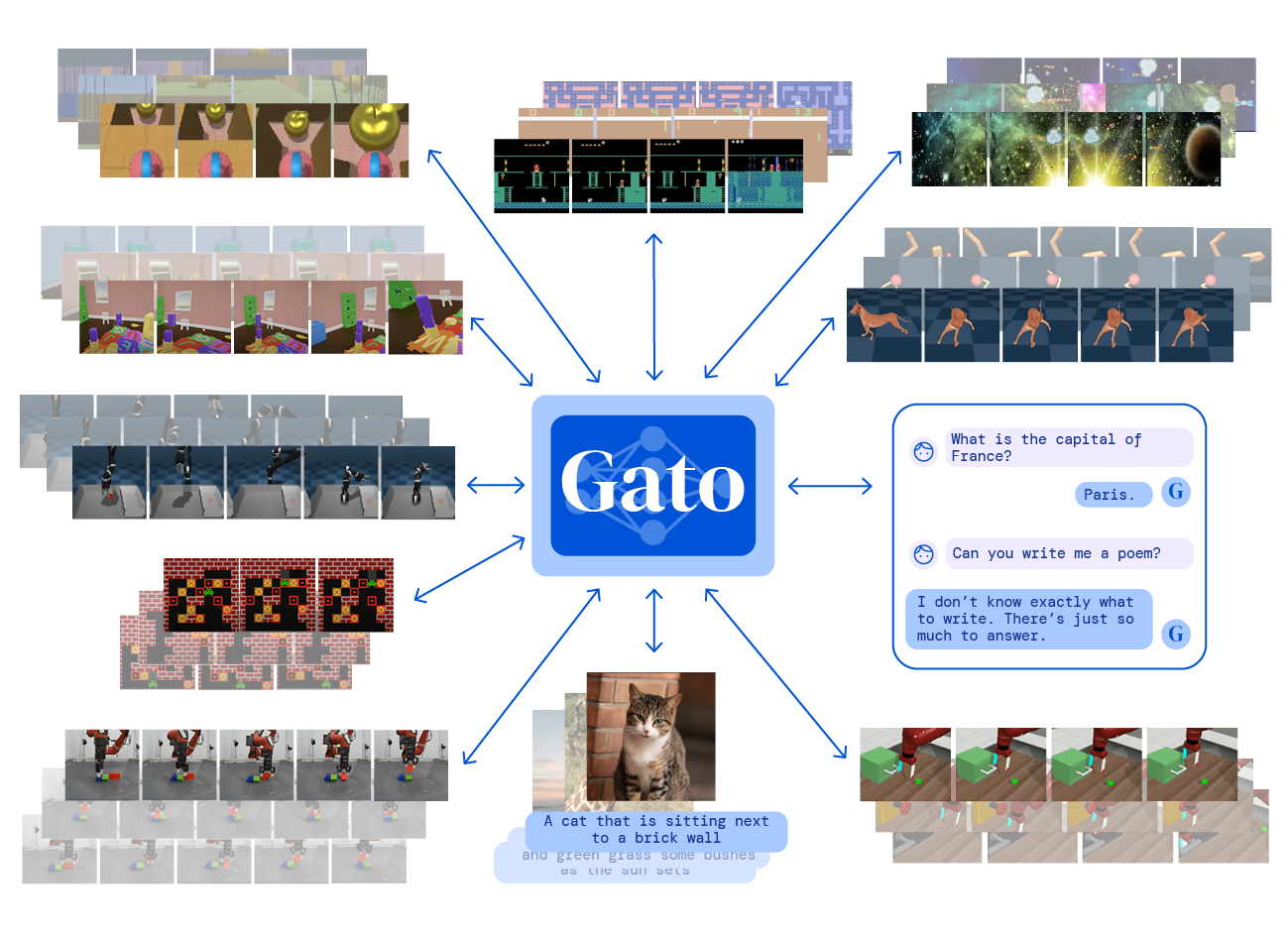
أعلنت شركة علي بابا، عبر مختبر Tongyi التابع لها، عن إطلاق مجموعة Qwen-Robot، وهي عائلة من نماذج الذكاء الاصطناعي المُجسّد التي تهدف إلى سد الفجوة بين قدرة نماذج الذكاء الاصطناعي اللغوية والبصرية على الفهم والاستدلال، وبين التنفيذ الفعلي للأفعال الحركية بواسطة الروبوتات في العالم الحقيقي.
رغم قدرة النماذج الحالية على إدراك البيئة المحيطة ووصف الخطوات اللازمة لتنفيذ أوامر معينة، إلا أنها تفتقر إلى القدرة على التحكم المباشر في أجزاء الروبوت لتطبيقها. وتزداد هذه المشكلة تعقيداً بسبب طبيعة بيانات تدريب الروبوتات، التي تُجمع من حساسات وأنظمة ملاحة مختلفة، وتعد أكثر تشتتاً من بيانات الإنترنت المعتادة، مما يجعل دمجها المباشر تحدياً تقنياً يؤدي غالباً إلى تراجع في الأداء.
لمعالجة هذا التحدي، طورت الشركة ثلاثة نماذج متخصصة تعمل بشكل متكامل لتشغيل الروبوتات بدقة. النموذج الأول هو Qwen-RobotNav، الذي يركز على الملاحة وتوجيه حركة الروبوت في المساحات المختلفة. وقد أثبت هذا النموذج قدرته عملياً من خلال توجيه روبوت رباعي الأرجل من يونتري للتنقل داخل شقة غير مألوفة، معتمدًا على الأوامر الصوتية فقط دون الحاجة إلى خرائط مسبقة.
أما النموذج الثاني فهو Qwen-RobotManip، ويختص بالتفاعل الفيزيائي المباشر مع الأشياء. يوفر هذا النموذج للروبوت القدرة على الإمساك بالأدوات وتحريكها والتعامل معها بدقة، معتمداً على تدريب مكثف شمل آلاف الساعات من البيانات، مما أهله لتحقيق نتائج متقدمة في اختبارات الروبوتات الواقعية. وفي الوقت نفسه، يعمل النموذج الثالث Qwen-RobotWorld كنظام لمحاكاة البيئة المحيطة؛ حيث يتنبأ بالتغيرات الفيزيائية ويساعد الروبوت على توقع النتائج المحتملة لحركاته قبل تنفيذها، مما يسهم في اتخاذ قرارات أكثر دقة.
إلى جانب هذه النماذج الأساسية، قدمت الشركة إطار عمل Qwen-RobotClaw الذي يمنح الروبوتات مرونة أكبر في اتخاذ قرارات بديلة عند مواجهة عقبات، مثل البحث التلقائي عن مسار بديل إذا كانت الوجهة الأصلية غير متاحة. كما وفرت منصة Chat2Robot المفتوحة المصدر لاختبار تفاعلات الذكاء الاصطناعي بسهولة.
تعكس هذه الإصدارات توجه الشركة نحو تعزيز حضورها في قطاع الذكاء الاصطناعي الفيزيائي، لتنضم إلى سباق التطوير العالمي القائم مع شركات تقنية أخرى تسعى لبناء أنظمة تتفاعل بفعالية مع العالم المادي.