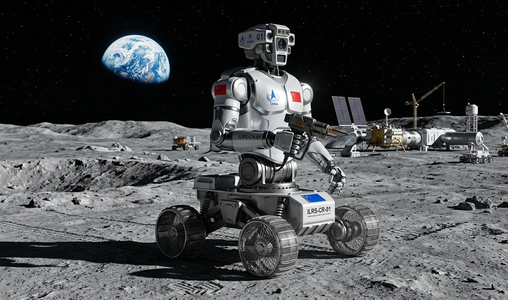
يعمل مهندسون صينيون في "معهد بكين لهندسة أنظمة المركبات الفضائية" على تطوير روبوت بشري متعدد الاستخدامات للعمل على سطح القمر.
يتميز هذا الروبوت بالجمع بين القدرة على التنقل السريع والمستقر باستخدام جلات، والبراعة الحركية العالية، حتى يتمكن بالقيام بأعمال البناء في "محطة الأبحاث القمرية الدولية" (ILRS) التي تهدف الصين لإنجاز نموذجها الأساسي بحلول عام 2035. إلى جانب البناء، سيتولى الروبوت مهام صيانة المعدات، وإجراء التجارب، وجمع العينات القمرية.
صُمم الهيكل الميكانيكي للروبوت ليتمتع بمرونة ودقة تشغيلية عالية؛ حيث يمكن لخصره أن يدور بزاوية 180 درجة في كلا الاتجاهين، وينحني للأمام حتى 90 درجة، مما يمكنه من الوصول إلى الأدوات وتوجيهها بفعالية في البيئات والتضاريس الصعبة. كما توفر يده المفصلية أربع "درجات من الحرية"، مما يسمح له بالتعامل الدقيق والآمن مع الأشياء والمعدات.
و لمواجهة قسوة البيئة القمرية، يعتمد الروبوت في تنقله على عجلات ذات تصميم شبكي معدني معزز بأسلاك فولاذية. يوفر تصميم هذه العجلات المتانة اللازمة مع الحفاظ على المرونة العالية وامتصاص الصدمات، مما يساعد الروبوت على الحفاظ على قوة الجر، وقطع مسافات طويلة بسلاسة على سطح القمر الوعر، حتى في ظل درجات الحرارة شديدة البرودة.