يحتوي القمر على شبكة من الكهوف العميقة وأنابيب الحمم البركانية التي قد تشكل ملاذاً آمناً للبشر تحميهم من الإشعاعات وتقلبات الحرارة القاسية. لكن الطبيعة الوعرة لهذه التضاريس، بمنحدراتها العمودية وفوهاتها الزلقة، تجعل استكشافها أمراً شبه مستحيل باستخدام العجلات التقليدية؛ فالمركبات الجوالة الصغيرة تعاني من قيد فيزيائي يتمثل في صغر عجلاتها، مما يحد من قدرتها على تجاوز العقبات الضخمة.
ولحل هذه المعضلة، نجح فريق بحثي من المعهد الكوري المتقدم للعلوم والتكنولوجيا (KAIST) في تطوير عجلة مبتكرة قابلة للتحول، صُممت خصيصاً لاقتحام التضاريس القمرية الوعرة.
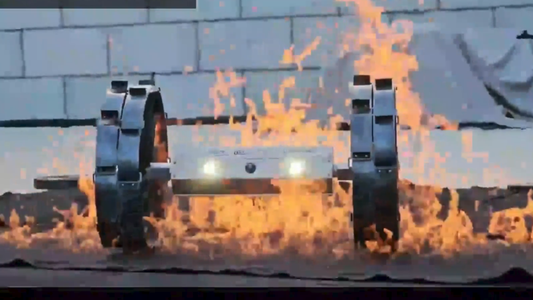
تختلف هذه العجلة جذرياً عن الإطارات المألوفة؛ فهي لا تعتمد على الهواء أو المطاط، ولا تستخدم المفاصل الميكانيكية المعقدة التي قد تتعرض للتلف بسبب الغبار القمري والفراغ. بدلاً من ذلك، تتكون العجلة من شرائط فولاذية مرنة منسوجة معاً بذكاء (هيكل تبادلي)، لتبدو وكأنها كرة شبكية مرنة وقوية، تعتمد على أجهزة شد قماشية للتحكم في شكلها.
الميزة الأبرز لهذا الابتكار هي قدرته على تغيير الحجم؛ إذ يمكن طي العجلة لتصبح بقطر صغير (230 ملم) لتوفير المساحة أثناء النقل والشحن داخل الصواريخ، وبمجرد الوصول إلى سطح القمر، تتمدد ليتضاعف حجمها إلى (500 ملم). هذا التوسع يمنح الروبوتات الصغيرة ارتفاعاً كافياً عن الأرض وقدرة فائقة على تسلق الصخور الكبيرة التي تعجز العجلات الصغيرة عن تجاوزها.
تعمل مرونة المعدن المنسوج كنظام تعليق متطور؛ فعند الاصطدام بصخرة، تنبعج العجلة لامتصاص الصدمة واحتواء العقبة بدلاً من الانزلاق عليها. وقد أثبتت الاختبارات باستخدام تربة قمرية محاكية أن هذه المرونة تسمح للروبوت بتحمل سيناريوهات السقوط الحر.
فبدلاً من استخدام أنظمة معقدة لإنزال الروبوتات بالحبال إلى داخل الكهوف العميقة، يمكن ببساطة إسقاط الروبوت المزود بهذه العجلات؛ حيث تعمل كوسادة هوائية تمتص صدمة الارتطام. وأكدت النتائج قدرة العجلة على تحمل سقوط يعادل ارتفاع 100 متر في جاذبية القمر دون أن تفقد قدرتها على العمل.
نُشر هذا البحث الذي يمهد الطريق لأسراب من الروبوتات المستكشفة في دورية "ساينس روبوتكس" (Science Robotics).