معظم الروبوتات تستخدم في أعمالها يد واحدة فقط، وأحياناً تستخدم اليدين معاً لكن لإنجاز مهام كرفع حمولة والتي لا تتطلب براعة في استخدام الأصابع و تنسيق عالي بين عمل اليدين معاً، كما هو الحال في مهام مثل ربط الحذاء وتعليق الملابس.
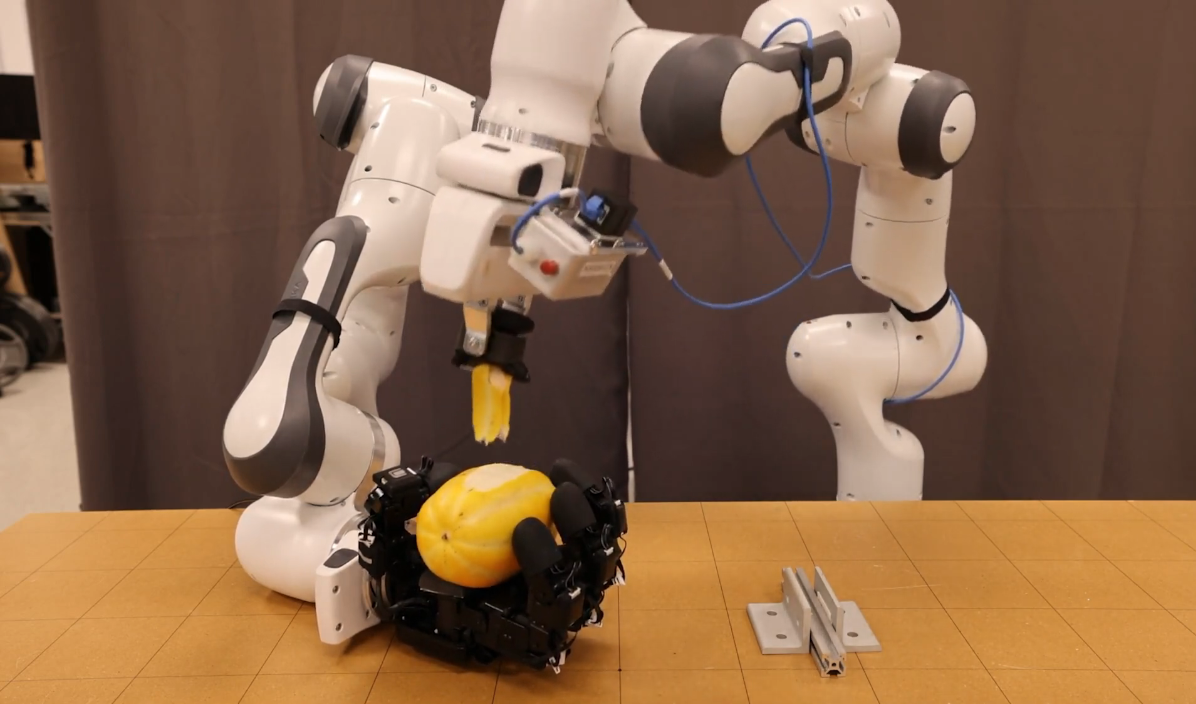
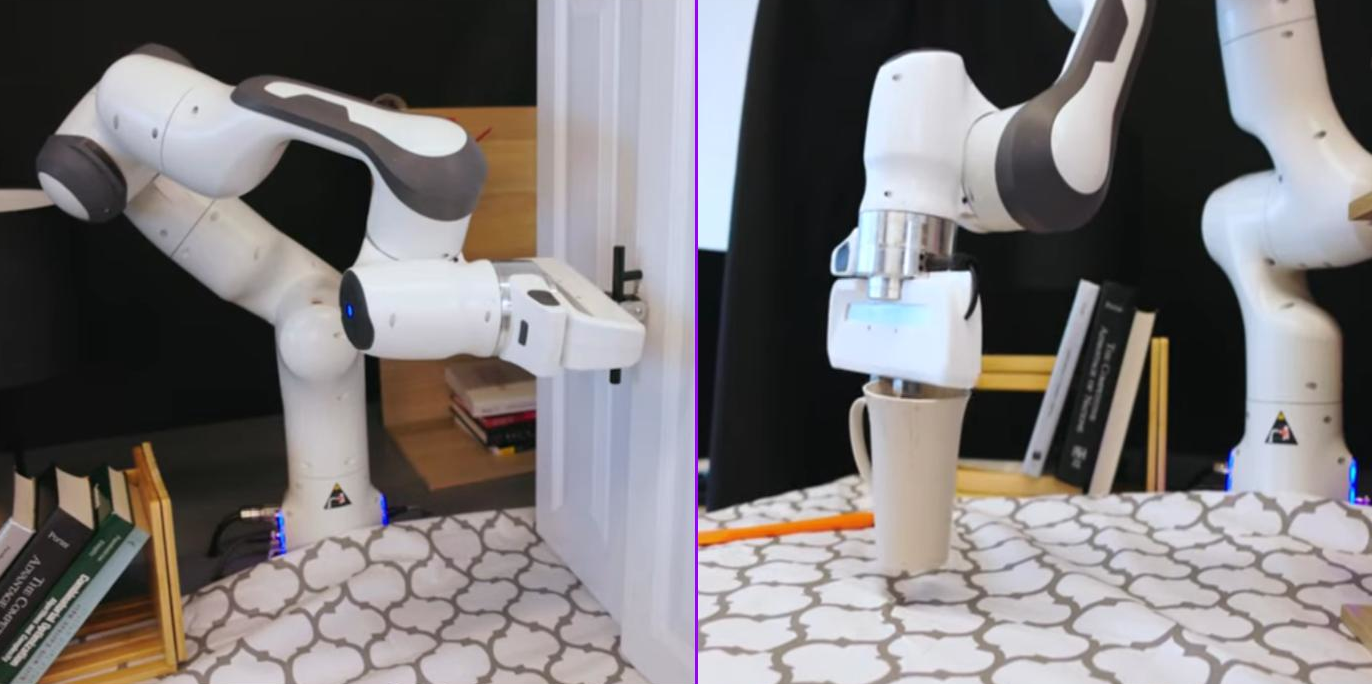
تحاول جوجل ديب-مايند تطوير الروبوتات لتتمكن من استخدام اليدين معاً ببراعة عالية لإنجاز مهام معقدة، وقد قدمت إطار عمل جديد أطلقت عليه ALOHA Unleashed، يعتمد على طريقة جديدة لتدريب الروبوتات من خلال العروض التوضيحية التي تم تسجيلها خلال فترات زمنية طويلة على منصة ALOHA 2، وهي عبارة عن ذراعين روبوتيين يمكن التحكم بهما عن بعد وتنفيذ المهام وتسجيلها، ثم يتم استخدام هذه العروض التوضيحية لتدريب الروبوتات على أداء المهمة.
اعتمدت غوغل في إطار تدريبها الجديد ALOHA Unleashed على نموذج ذكاء اصطناعي يشبه في آلية عمله نموذجها لتحويل النص إلى صور (إيماجن)، إذ يقوم بتوقع الفعل الذي على الروبوت القيام به من خلال تحسينات متكررة، كما يفعل إيماجن إذ يبدأ بصورة عشوائية ثم يقوم بتحسينها تدريجياً حتى يصل لأفضل صورة. وقد استخدمت معمارية المحول ودربته بهذه الطريقة (الانتشار)، وقامت باختباره على 5 مهام حقيقة.
اختبر الباحثون طريقتهم هذه على 5 مهام حقيقة وهي: تعليق قميص، ربط الحذاء، استبدال إصبع روبوت، إدخال التروس، وترتيب عناصر المطبخ. ابنى الباحثون نموذج لكل مهمة، واستخدموا حوالي 26 ألف عرض توضيحي لتدريبهم، ووجدوا أن طريقتهم الجديدة تعطي نتائج واعدة وتنجح في نقل الخبرة إلى الروبوت لينفذ المهمة على أرض الواقع، وقد أرفقوا بحثهم بفيديوات تعرض نجاح الروبوت بتنفيذ المهام الخمس.
يسعى الباحثون لتطوير نموذج واحد قادر على القيام بمهام متعددة بدلاً من نموذج لكل مهمة، وذلك لتقليل تعقيد تطويره وكلفته و تسهيل إدارة النماذج المتعددة على نفس الروبوت.