تحاول الشركات تدريب الروبوتات لتعمل في أي بيئة و أي مكان، وهذا يجعل العملية معقدة بسبب التنوع الكبير و الاختلافات الدقيقة التي قد تجعل نماذج الذكاء الاصطناعي تواجه تحديات لم تتعامل معها مسبقاً.
لكن هذا الهدف الكبير ببناء روبوت عام يعمل في أي مكان قد لا يهم المستخدم الذي يريد الروبوت ليعمل في منزله ومطبخه ولا يكترث على قدرته على العمل بمنزل جاره، لذا قام باحثون في MIT بتجربة طريقة جديدة أقل تكلفة وأكثر عملانية في تدريب الروبوتات.
تقوم الطريقة على جعل الروبوت يتدرب في محاكاة للمنزل أو المكان الذي سيعمل به، حتى يتقنه قبل أن يتم وضعه قيد العمل. ولذا يتم أولاً تصوير المنزل بكاميرا هاتف عادية ويتم تحويل هذه الصور إلى محاكاة ثلاثية الأبعاد للمنزل، ثم يتم تصميم الروبوت للتدرب في المحاكاة. يقوم الروبوت بتجريب سيناريوهات متعددة ويتعلم من التجربة والخطأ باستخدام التعلم المعزز، وهكذا يتجنب الروبوت الأذى المادي له وللأغراض في العالم الحقيقي، فيتقن مهامه قبل نقل خبرته إلى الروبوت الحقيقي.
أطلقوا على طريقتهم هذه اسم RailTO : من الواقع إلى المحاكاة ثم إلى الواقع، ذلك أنه في البداية يتم نقل المنزل إلى المحاكاة كما يتم نقل الروبوت وما تعلمه من نماذج أساسية من خلال تدريبه على بيانات حقيقية، ثم يتم تعزيز تدريبه في المحاكاة، وبعدها يتم إعادة هذه النماذج المحسنة إلى الروبوت لتعمل في الواقع.
يحقق تدريب الروبوت بهذه الطريقة فوائد عدة، فهو أكثر أماناً، كما أنه أسرع وأقل تكلفة. لكن بالمقابل فإن النماذج المدربة في المحاكاة قد تواجه مشاكل غير متوقعة عند تشغيلها في العالم الواقعي فمهما كانت المحاكاة قريبة يوجد عوامل قد تجعل أدائها أقل كفاءة.
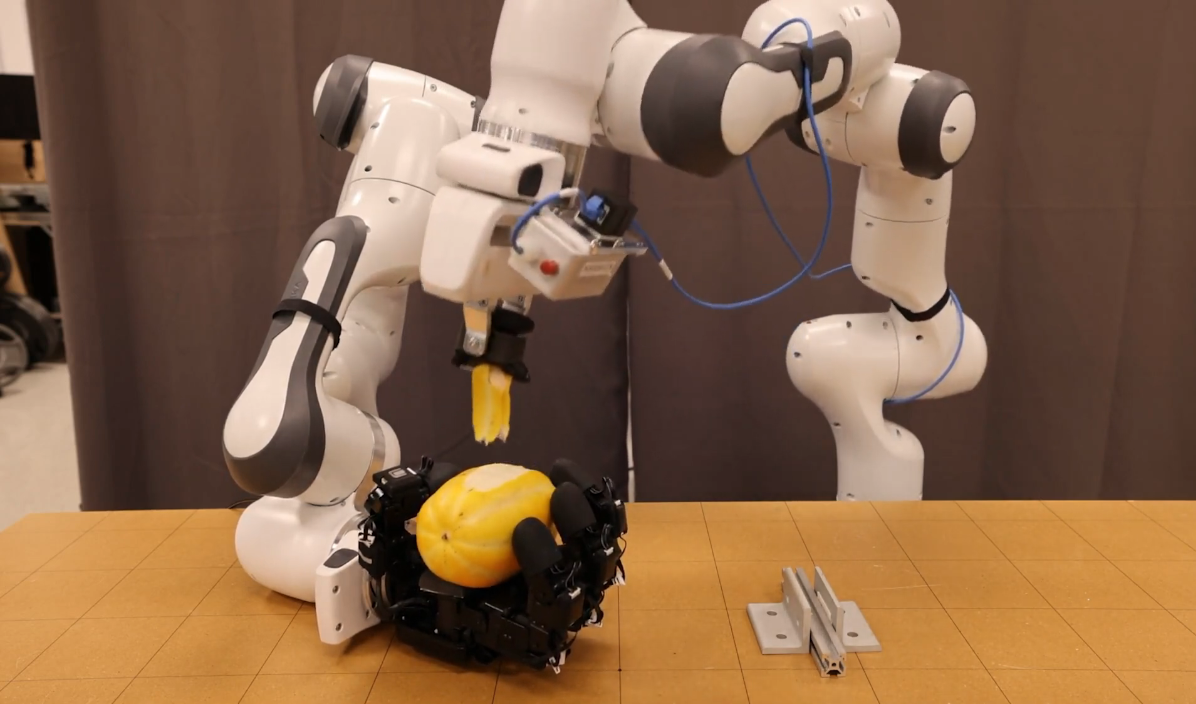
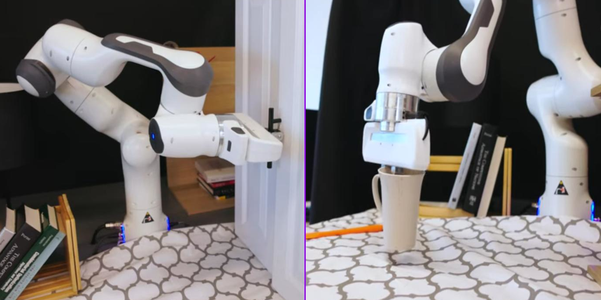
لكن النتائج التجريبية تبين فعالية هذه الطريقة في تحسين قدرات الروبوت، فقد تم تقييمها على العديد من المهام مثل تكديس الأطباق على الرف، ووضع الكتب على الرف، وست مهام أخرى. وتبين أن استخدام RialTo تزيد دقة العمل أكثر من 67% فيما لو اكتفينا بالتدريب على البيانات الحقيقية.
وهكذا فإن تطوير RialTo يقربنا من واقع يمكن تخصيص الروبوتات المنزلية لتتقن البيئة التي ستعمل بها قبل نشرها، مما يزيد في جودة أداء المهام ويقلل الأخطاء ويسرع عملية نشرها.