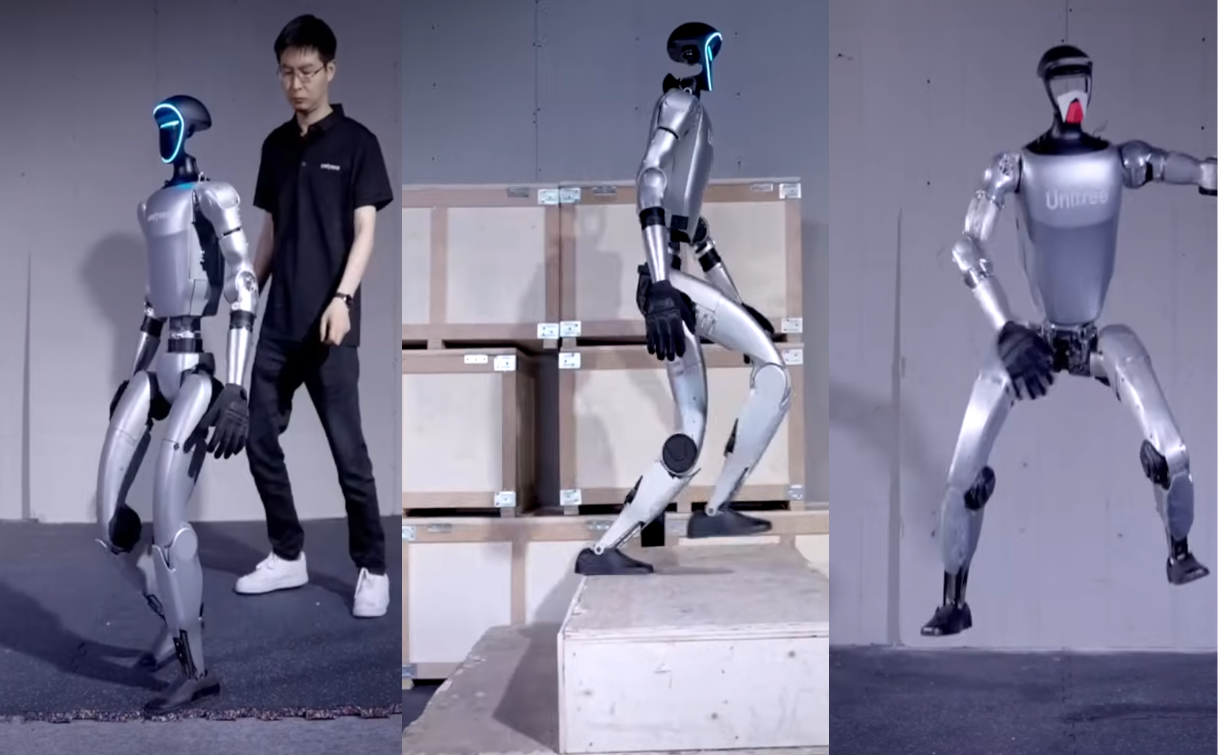
إن تصميم روبوتات يمكنها المشي على قدمين بمرونة عالية أمر في غاية التعقيد، وعلى الرغم من التقدم الكبير الواضح في بعض الروبوتات مثل أطلس من بوستن داينامكس، فإن معظم الروبوتات ثنائية الأرجل لا تزال تكافح لتحقيق مرونة كبيرة في الحركة.
يستكشف الباحثون باستمرار استخدام تقنيات تساعد على الحركة، و يأتون بأفكار جديدة مستلهمة من الطبيعة - مثل كيفية تحريك البشر لأذرعهم أثناء الجري أو كيف ترفرف الطيور مثل النعام والدجاج بأجنحتها عند القفز أو الجري.
يأتي أحد هذه الأساليب المبتكرة من الباحثين في جامعة شاندونغ في الصين، فقد طوروا روبوتاً ثنائي الأرجل يسمى KOU-III، والذي يشتمل على أربعة دوارات -تشبه ما تستخدمه الطائرات بدون طيار - لمساعدته على الحركة. تلعب هذه الدوارات، دوراً في الحفاظ على استقرار الروبوت، ومنعه من الانقلاب أو السقوط، كما توفر الرفع اللازم لمساعدة الروبوت على أداء حركات القفز.
ولاستيعاب هذه الآلية الجديدة، أجرى الفريق تحسينات كبيرة على مفاصل ركبة الروبوت. فمن خلال تعزيز صلابة وتماسك محرك مفصل الركبة، أصبح الروبوت أكثر متانة وقدرة على التعامل مع الصدمات.
ويسلط البحث، الذي نُشر في مجلة علمية متخصصة، الضوء على فعالية هذه التحسينات. وأظهرت التجارب أن الروبوت ثنائي الأرجل، بمساعدة دوارات رباعية، أبدى تحسناً كبيراً في الاستقرار وأداء الحركات.
يُظهر هذا التطور المبتكر إمكانات الجمع بين الآليات الروبوتية التقليدية وتكنولوجيا الطائرات بدون طيار، ويفتح آفاقاً جديدة للبحوث المستقبلية في مجال الروبوتات.