رغم أن دماغ النحلة لا يتجاوز حجم حبّة السمسم، إلا أنه يُظهر قدرة مذهلة على معالجة المعلومات البصرية أثناء الطيران. لا تعتمد النحلة على رؤية ثابتة كما تفعل الكاميرات، بل تستخدم حركات جسدها الدقيقة أثناء الطيران لمسح البيئة من زوايا متعددة، مما يمنحها إدراكاً بصرياً ديناميكياً يسمح لها بالتعرّف على الزهور، بل وحتى تمييز وجوه البشر بدقة ملحوظة.
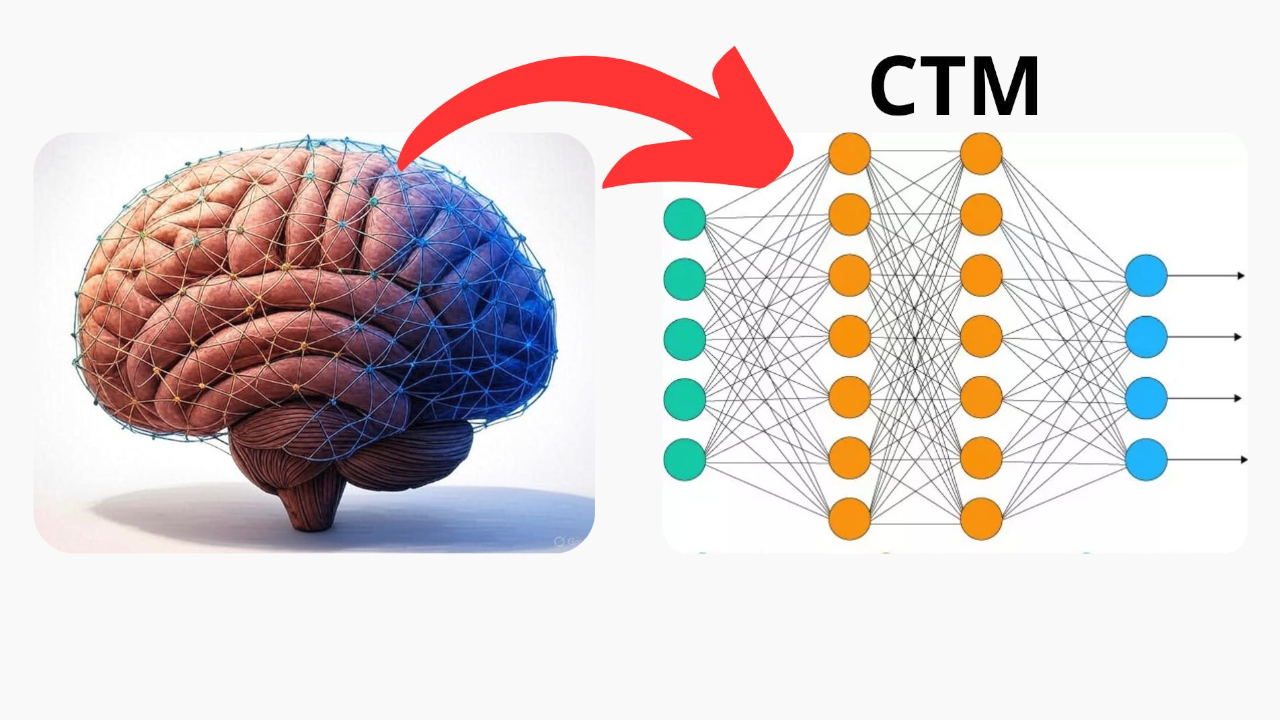
هذا السلوك الفريد ألهم علماء من جامعة شيفيلد وجامعة كوين ماري في لندن لبناء نموذج حاسوبي يحاكي آلية عمل دماغ النحلة، في محاولة لفهم كيف يمكن لحركة بسيطة أن تعزز الذكاء.
بدأ الباحثون بمراقبة سلوك النحل أثناء الطيران، ولاحظوا أن النحلة لا تطير بخط مستقيم، بل تهتز وتتمايل، مما يخلق تغيّرات بصرية مستمرة تساعدها على فهم العالم من حولها. هذه الحركات ليست عشوائية، بل استراتيجية ذكية تُستخدم لجمع معلومات بصرية من زوايا مختلفة، وهو ما يُعرف بـ"الرؤية النشطة". انطلاقاً من هذه الملاحظة، قرر الفريق بناء نموذج حاسوبي يحاكي هذا السلوك، ليس فقط لفهمه، بل لاستخدامه كقاعدة لتطوير أنظمة ذكاء اصطناعي أكثر كفاءة وواقعية.
اعتمد الباحثون على البنية العصبية الحقيقية لدماغ النحلة، وقاموا بترجمتها إلى شبكة عصبية صناعية تتكوّن من عدة طبقات تحاكي المسارات العصبية البصرية. تبدأ هذه الشبكة من طبقة تستقبل الإشارات من العين، ثم تمر عبر طبقات تحلل الحواف والاتجاهات، وتدمج المعلومات لتوليد استجابات، وصولًا إلى مركز التعلّم والذاكرة الذي يُعرف بالجسم الفطري، حيث يتم اتخاذ القرار النهائي بناءً على الخبرة السابقة.
النموذج لا يكتفي باستقبال الصور، بل يحاكي طريقة النحلة في الطيران، حيث يتم إدخال صور متتابعة كما تراها النحلة من زوايا مختلفة. كل خلية عصبية في النموذج تستجيب في توقيت مختلف حسب اتجاه الحركة، مما يسمح بفهم دقيق للأنماط المتحركة. وعند التعرّف على نمط بصري معين، مثل زهرة أو وجه، يتم تعديل الاتصالات العصبية باستخدام تقنية التعلم المعزز كما لو أن النحلة تتلقى "مكافأة" عصبية، تحاكي تأثير الدوبامين. هذا التفاعل بين الإدراك والمكافأة يسمح للنموذج بالتعلّم من التجربة، تماماً كما تفعل النحلة.
تم تدريب النموذج على مهام تعرّف بصري مثل التمييز بين أنماط هندسية والتعرّف على الزهور و الوجوه البشرية وتحديد اتجاهات الحركة. وقد أظهر النموذج أداءً عالياً في هذه المهام، متفوقاً على النماذج التقليدية التي تعتمد على رؤية ثابتة. اللافت أن النموذج استخدم عدداً قليلاً جداً من الخلايا العصبية، ومع ذلك حقق دقة تصل إلى 98% في بعض المهام، مما يدل على كفاءة عالية في استخدام الموارد الحسابية.
هذا النموذج يثبت أن الذكاء لا يتطلب شبكات ضخمة أو طاقة هائلة، بل يمكن تحقيقه من خلال تفاعل ذكي بين الإدراك والحركة. ويمكن استخدام هذا النموذج لتطوير روبوتات طائرة تتعلم أثناء الطيران، أو أنظمة رؤية ذكية في السيارات الذاتية القيادة، أو روبوتات استكشافية تتفاعل مع البيئة بفعالية. إنه يفتح الباب أمام نوع جديد من الذكاء الاصطناعي يُعرف بالذكاء الحركي، حيث لا يكون الذكاء مجرد معالجة بيانات، بل نتيجة تفاعل مستمر بين الجسم والبيئة.
نشرت الدراسة في مجلة eLife.