يعمل باحثون في جامعة ولاية أوكلاهوما على تطوير واجهة دماغ-كمبيوتر تساعد في التحكم في الروبوتات، يرتديها مشغل الروبوتات لتقوم بنقل الإشارات مباشرة من الدماغ إلى الروبوت في حالات الخطر.
في البيئات عالية المخاطر مثل المفاعلات النووية، من الصعب التحكم بالروبوتات عن بعد وقيادتها لتنفيذ المهام، وربما من الأفضل مراقبتها وتركها تنفذ الأفعال لتخفيف العبء والإرهاق الذهني عن المشغل البشري. لكن غالباً ما يدرك الإنسان المشغل أشياء قبل الروبوت ويلحظ أنه سيقوم بخطأ أو سيصطدم بعائق ما، وفي تلك اللحظة تتولد إشارة دماغية تُعرف باسم "الجهود المرتبطة بالخطأ" (ErrPs) في منطقة القشرة الأمامية من الدماغ خلال أجزاء بسيطة من الثانية. في أنظمة التشغيل التقليدية، يحتاج الإنسان لوقت أطول بكثير ليقوم بفعل حركي كاستجابة بدنية لتدارك الموقف (مثل تحريك يده لضغط زر التوقف)، ومن ثم نقله كأمر إلكتروني للروبوت، وهذا يجعل التدخل البشري متأخراً جداً لمنع وقوع الضرر.
لهذا، ولتقليل زمن التأخير ونقل التحذير للروبوت مباشرة لحظة الإدراك البشري ليقوم الروبوت بإبطاء الحركة أو التوقف لتفادي الكارثة في غضون أجزاء من الألف من الثانية، يتم وضع واجهة عبارة عن غطاء رأس لتخطيط كهربية الدماغ (EEG) لتنقل الإشارات الكهربائية وترصدها فور انبعاثها من الدماغ. ويتم تدريب نموذج ذكاء اصطناعي ليفهم أنماط النشاط الدماغي العامة ويفسر إشارات الإنذار الداخلي هذه بدقة وموثوقية. هذا النموذج الأولي لا يناسب كل شخص مباشرة لأن لكل شخص إشارات دماغية فريدة ومعقدة تشبه تماماً بصمات الأصابع، وبالتالي تتم إعادة ضبطه وتكييفه لكل شخص بسرعة ليتعلم النمط الخاص به، ولكن القاعدة الأساسية للنموذج وفهمه للإشارات نفسها موجودة مسبقاً، لهذا لا نحتاج إلى وقت إعداد طويل ليعمل النظام بفاعلية مع أي مستخدم جديد.
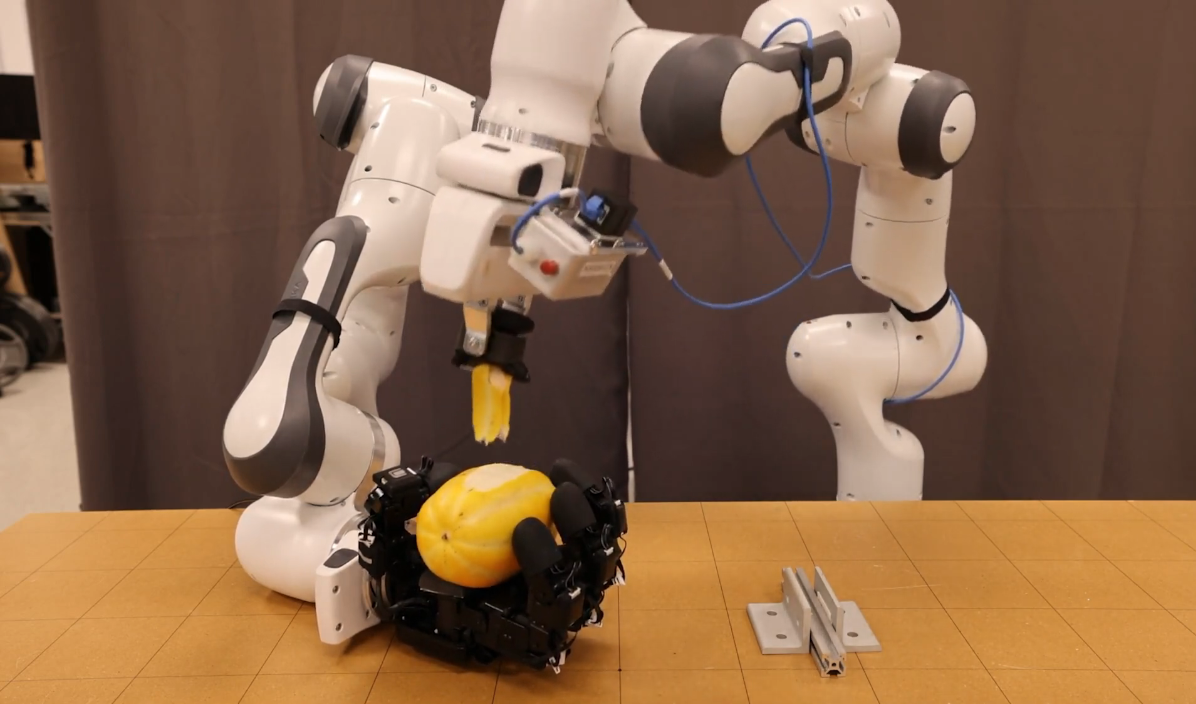
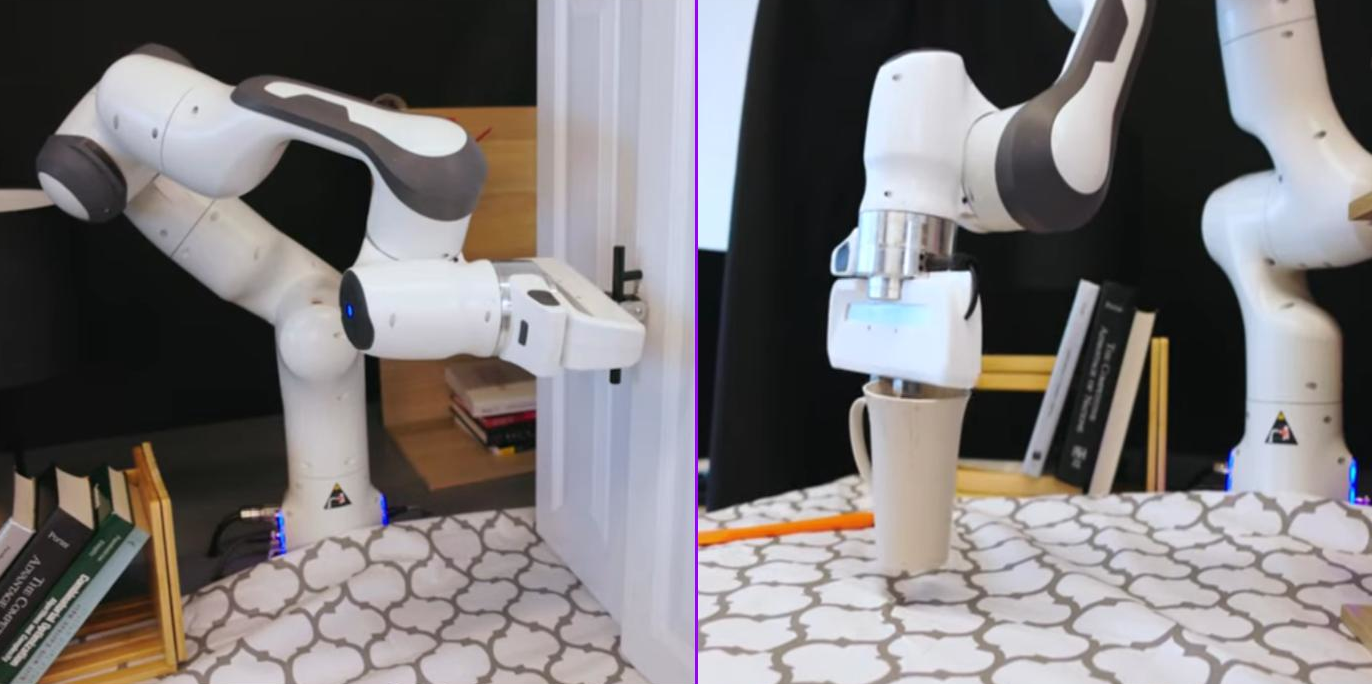
يوفر هذا النظام العصبي التكيفي حلاً لمشكلة البطء في التشغيل عن بُعد، ويمنح الآلات القدرة على الاستجابة للغريزة البشرية الاستباقية. ويتم اختباره حالياً في بيئات محاكاة مثل منصتي (NVIDIA Isaac Lab) و (Isaac ROS) بدعم من معالجات رسومية فائقة الأداء، حيث تتم معالجة الإشارات اللحظية وإجراء عمليات المحاكاة المعقدة في الوقت الفعلي تمهيداً لنقله إلى روبوت فعلي واستخدامه في بيئات صناعية حرجة.